



몰래 엿보다고조파 감소기폴리에테르에테르케톤(몰래 엿보다) 복합 소재를 하모닉 드라이브 구조에 적용하여 기존 하모닉 감속기의 높은 감속비 특성과 몰래 엿보다 소재의 경량화 장점을 결합한 혁신적인 정밀 감속 장치입니다. 구조적 특징, 소재 혁신, 성능 매개변수, 그리고 응용 분야라는 네 가지 측면에서 자세히 소개합니다.

I. 구조적 특징
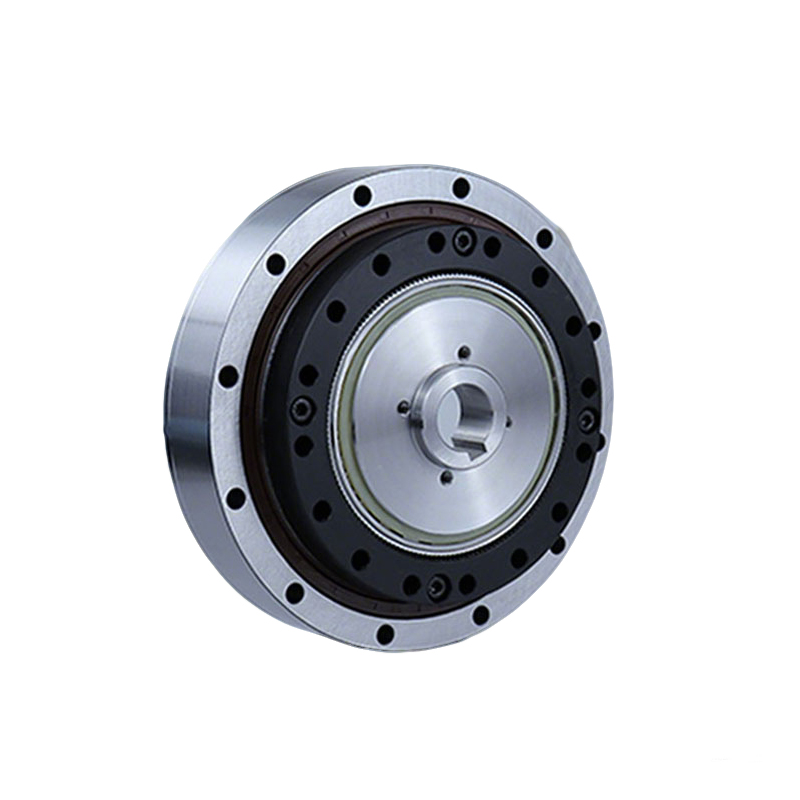
몰래 엿보다하모닉 감속기는 파동 발생기 - 유연 기어 - 강체 기어의 전통적인 하모닉 구동 구조를 채택합니다. 하모닉 감속기의 핵심 혁신은 유연 기어의 일체형 사출 성형에 50% 장섬유 강화 몰래 엿보다 소재를 사용하고, 강체 기어의 내부 기어 링은 몰래 엿보다-금속 인서트 구조(강철 베이스 + 몰래 엿보다 치면)를 사용한다는 것입니다. 파동 발생기 베어링의 외부 링은 몰래 엿보다 자체 윤활 케이지와 통합되어 기존 하모닉 감속기의 그리스 의존성을 제거합니다. 전체 구조는 위상 최적화를 통해 설계되었으며, 유연 기어의 벽 두께 공차는 ±0.01mm 이내로 제어되어 맞물림 중 일관된 탄성 변형을 보장합니다.
2세. 소재 혁신
경량 혁신: 몰래 엿보다 유연 기어의 밀도는 단 1.5g/센티미터³로 강철 유연 기어에 비해 무게를 60% 줄이고 관성 모멘트를 45% 낮추어 로봇 관절의 동적 반응 속도를 크게 향상시킵니다.
피로 저항성: 섬유 방향 최적화를 통해 몰래 엿보다 유연 기어의 굽힘 피로 수명은 정격 하중에서 10⁸ 사이클에 도달하여 강철 수준의 85%에 근접합니다.
마찰 최적화 : 몰래 엿보다 치면의 마찰계수는 0.05(건조 마찰 조건)로 매우 낮으며, 강성 기어 치면의 PTFE 코팅과 결합하면 오일 없이도 무소음 운전이 가능합니다(소음 발생).≤55dB).
3세. 핵심 성능 매개변수
감속비 범위: 50:1 ~ 320:1(단일단 변속기), 다단 직렬 연결을 지원하여 10,000:1의 초고감속비 달성
정격 토크: 3~50N・m (해당 모델 에이치엑스-14~에이치엑스-50) 최대 토크는 정격 토크의 2배에 도달할 수 있습니다.
정확도 지표: 백래시≤1분, 전송 오류≤30초각, 비틀림 강성≥20 북・미터/라드
환경 적응성: 작동 온도 -40℃180까지℃, 진공 환경과 호환 가능(10도에서 안정적으로 작동 가능)⁻⁶잘)
4.. 일반적인 응용 분야
협동 로봇: UR5e 로봇의 6번째 축과 같은 엔드 이펙터의 손목 관절은 가볍고 고정밀의 그립을 구현합니다.
의료 장비: 무균 환경 및 낮은 전자파 간섭을 준수해야 하는 수술용 로봇 팔(예: 다 빈치 시)의 소형 모션 조인트
항공우주: 위성 자세 제어 장치, 드론 기계팔, 진공 적응성과 가벼운 특성을 활용해 발사 비용을 줄입니다.
몰래 엿보다 하모닉 감속기: 탄소 섬유 강화 몰래 엿보다(CF/몰래 엿보다)를 사용하여 하모닉 감속기를 제작하면 변형 응력을 강철의 1/7로 줄이고, 감쇠 특성을 향상시키며, 공진 위험을 줄일 수 있습니다. 유연 기어와 강성 기어 이빨 사이의 접촉 이빨 수를 47% 증가시켜 피로 수명을 크게 연장할 수 있으며, 사이클 횟수는 금속 유연 기어의 경우 29,000회에서 564,000회로 증가합니다.
몰래 엿보다 고조파 감소기: CF/PEEK는 뛰어난 성능을 제공합니다
금속 기반 단형 실린더에 비해 비강도 및 내마모성 등의 장점 외에도몰래 엿보다 고조파 감소기CF/PEEK로 제작된 몰래 엿보다 고조파 감소기는 다음과 같은 특징을 가지고 있습니다:①낮은 변형 응력,②더 나은 감쇠 특성으로 공진 가능성을 효과적으로 줄입니다.③유연한 기어와 단단한 기어 이빨 사이의 접촉 이빨 수와 맞물림 면적이 증가하여 몰래 엿보다 하모닉 리듀서의 하중 지지력과 충격 저항성이 향상되었습니다.④뛰어난 피로수명 등
(1) 금속 기반 단원통형 하모닉 감속기와 비교했을 때, 동일 하중에서 몰래 엿보다 기반 복합재의 변형 응력은 강철의 1/7에 불과합니다. 따라서 더 작은 축 방향 치수에서 더 큰 기어 모듈과 반경 방향 변형 계수를 설계 구조에 적용할 수 있어 설계 자유도가 더욱 높아집니다.
(2) 몰래 엿보다 기반 복합재료 고조파 저감기 전체의 고유진동수는 금속 기반 고조파 저감기보다 40~45% 높은 것으로 나타나 몰래 엿보다 기반 복합재료 몰래 엿보다 고조파 저감기가 더 우수한 감쇠특성을 가지고 있어 공진 발생 가능성을 효과적으로 저감할 수 있음을 보여준다.
(3) 20N·m의 하중과 2000rad/min의 속도의 정격 운전 조건에서 몰래 엿보다 복합재 하모닉 감속기의 맞물림 이빨 수는 52쌍으로 증가하여 금속 대비 47% 증가했습니다. 유연 기어와 강성 기어 이빨 사이의 접촉 이빨 수와 맞물림 면적이 증가함에 따라 기어 쌍의 맞물림 면적이 넓어지고 접촉 압력이 더 많은 기어 이빨 표면에 분산되어 몰래 엿보다 하모닉 감속기의 하중 지지력과 내충격성이 향상되었습니다.
(4) 동일한 구조에서 CF/몰래 엿보다 단원통형 하모닉 감속기는 피로 수명이 더 우수합니다. 기존의 금속 하모닉 감속기는 과도한 변형 응력을 가지며, 유연 기어 이빨은 사이클 횟수가 29,000회에 도달하면 정적 파손을 일으킵니다. 몰래 엿보다 복합재로 제작된 유연 기어는 사이클 횟수가 564,000회, 피로 수명이 939.5시간으로 예상됩니다.











